5.2 图的存储结构
大约 3 分钟
5.2 图的存储结构
5.2.1 图的存储结构
- ①领接矩阵:顺序存储(一维数组存点的数据,二维数组存边的连接情况)(存储无向图、有向图)
- ②邻接表:顺序+链式存储(顺序存点的数据,链存连接该点的边)(存储有向图、无向图)
- ③十字链表:链式存储(存储有向图)
- ④邻接多重表:链式存储(存储无向图)
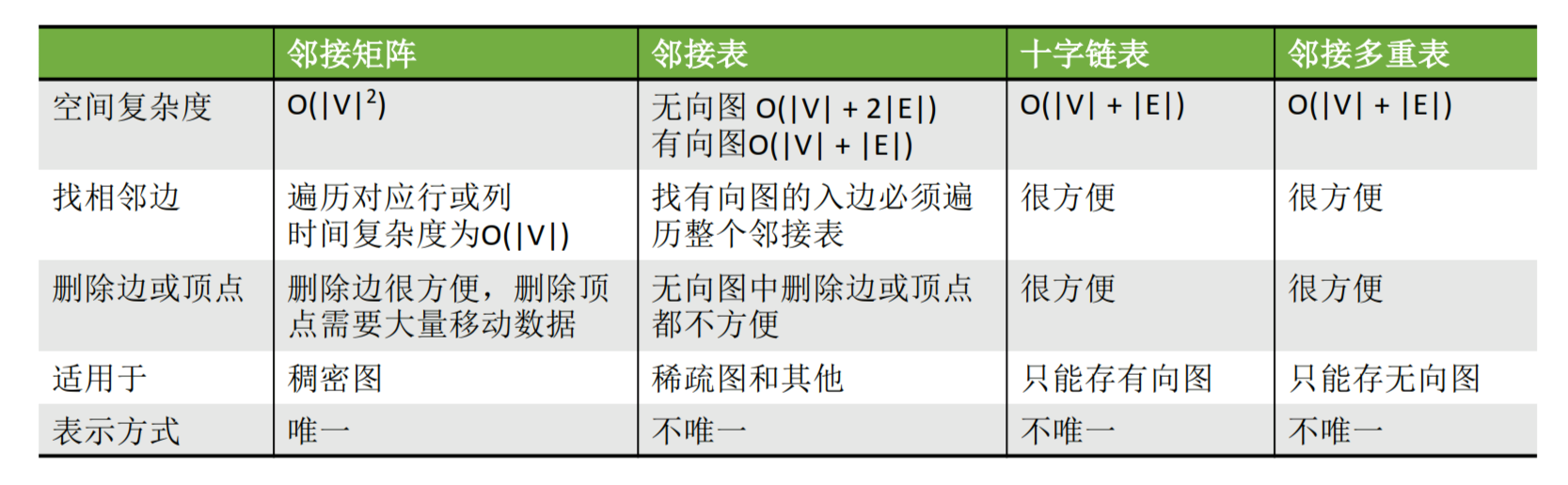
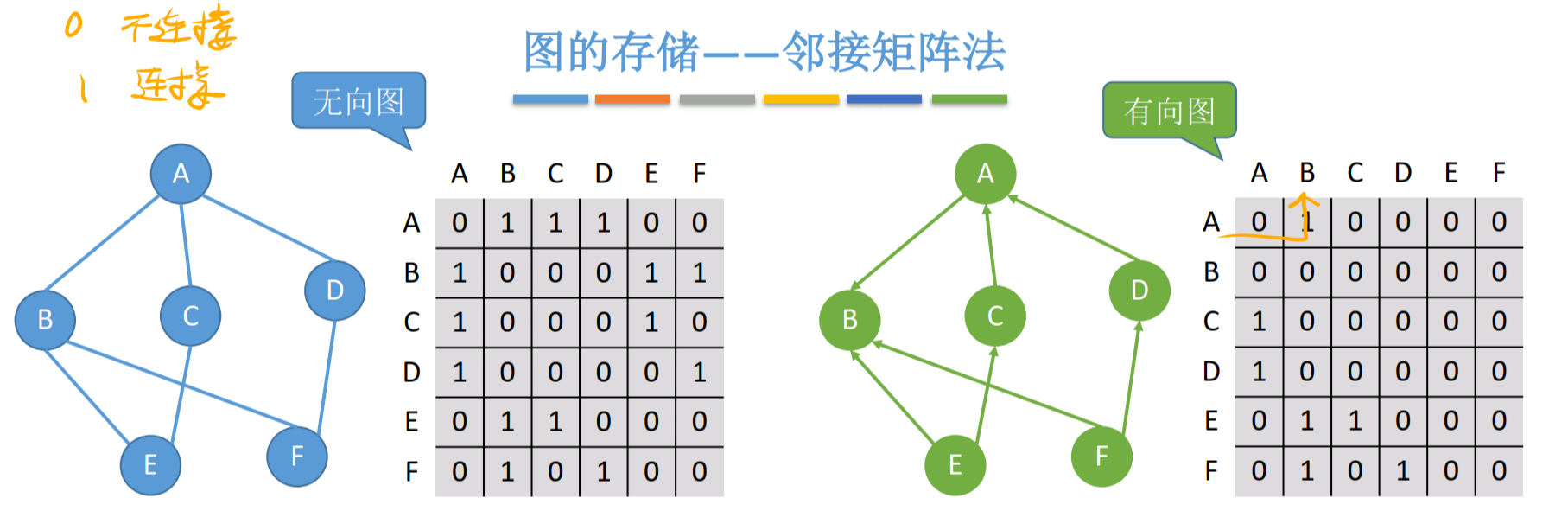
5.2.2 邻接矩阵法
空间复杂度=,适合存稠密图
无向图的邻接矩阵是对称矩阵,可以压缩存储,见3.6
性质:为图的邻接矩阵,则的元素=顶点i到顶点j的长度为n的路径的数目
计算度、入度、出度:必须遍历对应的行或列。 找相邻的边:必须遍历对应的行或列。
普通图的领接矩阵法:
#define MaxVertexNum 100 //顶点数目最大值
typedef struct{
char Vex[MaxVertexNum]; //顶点表:存每个点的数据
int Edge[MaxVertexNum][MaxVertexNum];//邻接矩阵,边表:存边的连接情况
int vexnum, arcnum; //图当前的顶点数和边数(弧数)
}MGraph;
边可以是int,bool或枚举型变量。
普通图的度、入度、出度
某点的度:某点的边数
无向图: 第i个结点的度=第i行(第i列)的非零元素个数。
有向图: 第i个结点的出度=第i行的非零元素个数。 第i个结点的入度=第i列的非零元素个数。 第i个结点的度=第i行、第i列的非零元素个数之和。
求顶点的度、入度、出度的时间复杂度=O()
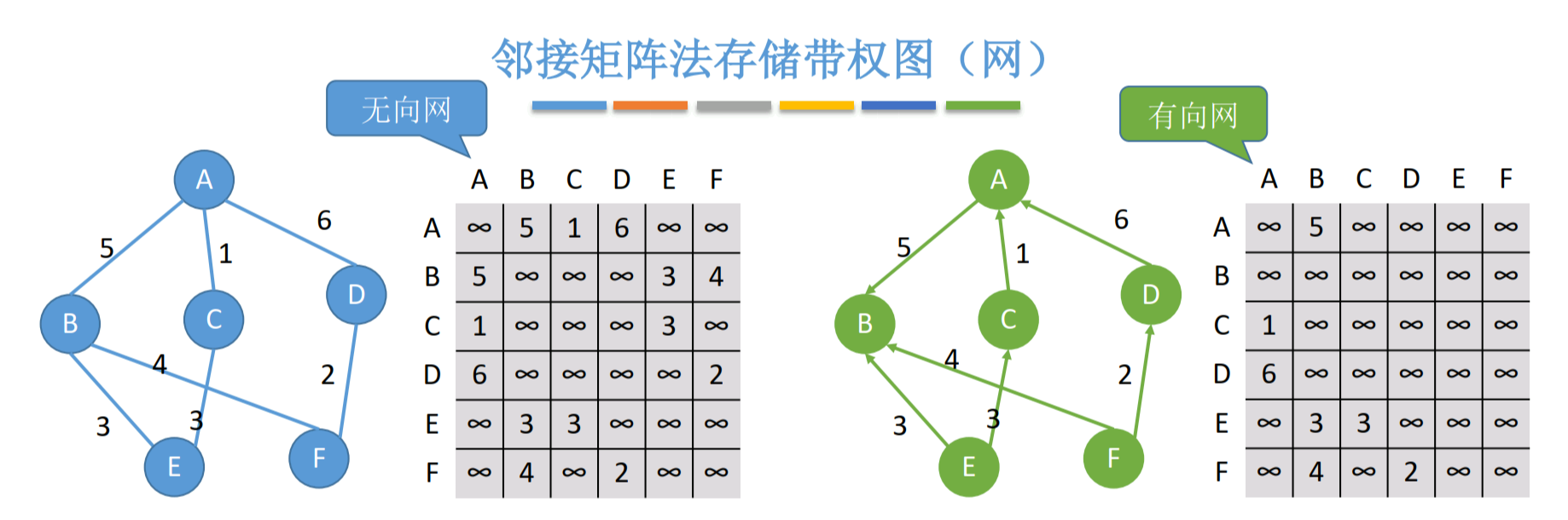
带权图的领接矩阵法
#define MaxVertexNum 100 //顶点数目最大值
#define INFINITY 4294967295 //宏定义常量“无穷”,4294967295为最大的int值
typedef char VertexType; //顶点的数据类型
typedef int EdgeType; //边的数据类型
typedef struct{
VertexType Vex[MaxVertexNum]; //顶点表:存每个点的数据
EdgeType Edge[MaxVertexNum][MaxVertexNum];//邻接矩阵,边表:存边的连接情况
int vexnum, arcnum; //图当前的顶点数和边数(弧数)
}MGraph;
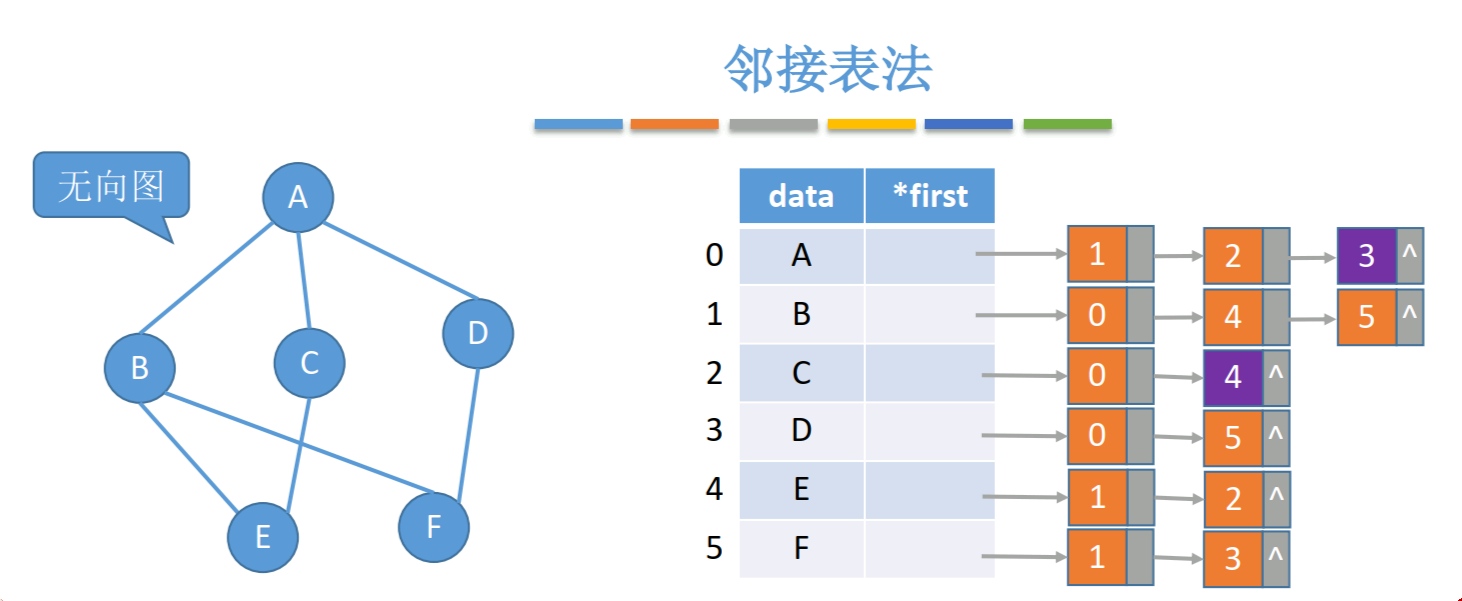
5.2.3 邻接表法
空间复杂度:无向图为,有向图为,适合存稀疏图表示方式不唯一
邻接矩阵降低了空间复杂度,但使操作不方便了: 计算度、入度、出度:计算有向图的度、入度不方便,其余很方便。
找相邻的边:找有向图的入边不方便。
图的类型描述:
与树的孩子表示法很像
#define MaxVertexNum 100 //顶点数目最大值
//"边(弧)"
typedef struct ArcNode{
int adjvex; //边(弧)指向那个结点
struct ArcNode *next; //指向下一条弧的指针
//InfoType info; //边权值
}ArcNode;
//"顶点"
typedef struct VNode{
VertexType data; //顶点数据
ArcNode *first; //顶点指向的第一条边
}VNode, AdjList[MaxVertexNum];
//用领接表存储图
typedef struct{
AdjList vertices; //顶点数组
int vernum, arcnum; ////图当前的顶点数和边数(弧数)
}ALGraph;
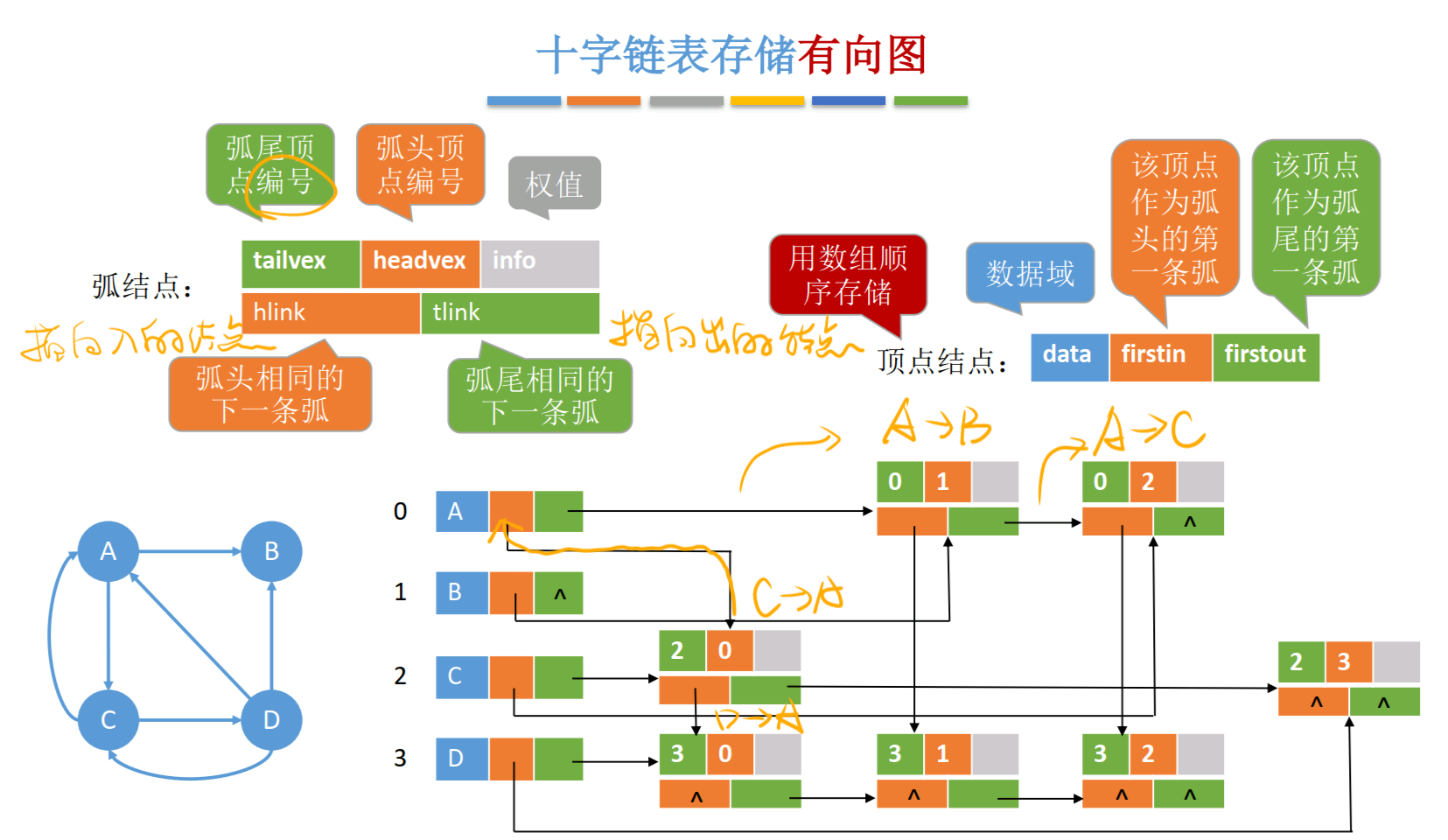
5.2.4 十字链表法
空间复杂度:,与邻接表法一样
解决了邻接表法的找入边难的问题。
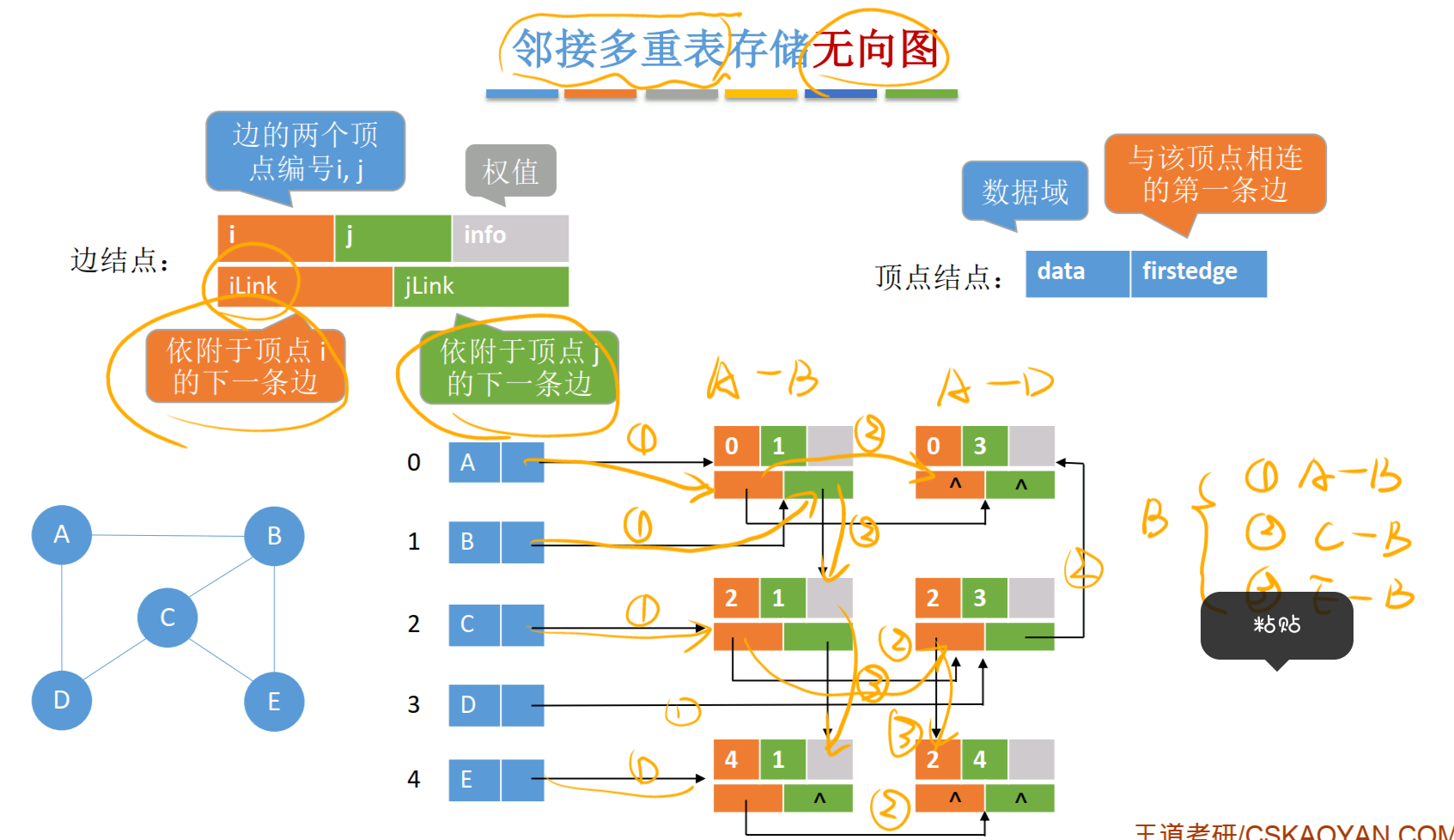
5.2.5 邻接多重表
空间复杂度:,比邻接表法的好
解决了邻接表法存两遍边的空间浪费。
删除边、删除结点等操作很方便。